Falls ihr hier im Artikel Informationen vermisst, schaut gerne mal in die anderen hier gelisteten Kategorien oder nutzt die Volltext-Suche
Einleitung
Bin gerade dabei einen halbautomatischen Honig-Abfüllbehälter zu bauen, angeregt durch ein paar Postings in der Facebook-Gruppe Imkerei und Technik. Eigenbau. Mit den Waagen kennen wir uns ja zu genüge aus. ;-) Dann bauen wir noch einen kleinen Servo dran, der den Quetschhahn bedient, wenn das Glas voll ist und fertig ist der Roboter, so die Theorie. Noch was vergessen? Ach ja, bisserl Elektronik und ein paar Zeilen Code, nicht der Rede wert.
Problem
Honig abfüllen ist manchmal langweilig. Wenn der Honig schon kandiert und zäh ist, sitzt man vor dem Loch des Quetschhahns wie die Katze vor dem Mauseloch und wartet ewig bis der letzte Tropfen für genau 350 g im Glas ist. Oder man träumt etwas und es sind 370 g drin. Die 20 g mehr gönne ich jedem, der ein Glas Honig von mir möchte, nur soll der oder die sich nicht ärgern wenn das Glas das erste mal aufgemacht wird und da gleich süßer Seim aussen am Glas runterläuft. Also mit dem Kaffeelöffel wieder etwas Honig raus, Glas auf die Waage und schauen, dass man nun nicht wieder unter 350 g ist. Genauer und vielleicht auch schneller ist da eine kleine, intelligente, never sleeping Maschine.
Als geübter Imker macht man das natürlich im Halbschlaf, manchmal aber unter Schlafmangel und wenn man ganz aufgeweckt ist, ist es dennoch als Maker cooler so was robotermäßig machen zu lassen als selbst zu machen.
Konzept und Anforderungen
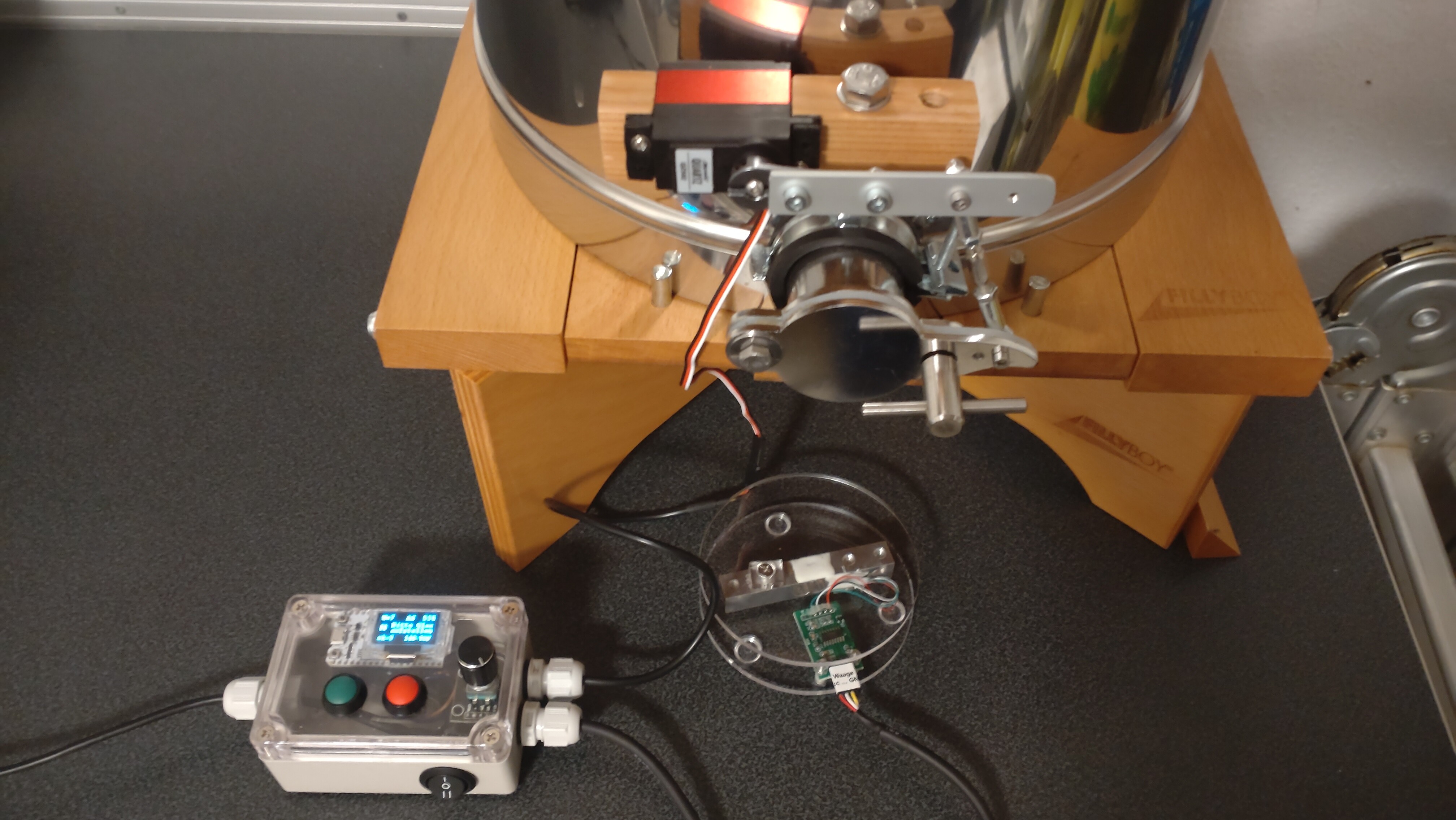
Funktionieren soll das Ganze mit einer Waage, die kontinuierlich das Gewicht misst, während in das Honigglas auf der Waage Honig abgefüllt wird. Die Waage soll möglichst flach sein, damit das Honigglas (ich habe leider sehr hohe) plus Waage unter den Hahn des Honigbehälters passen.
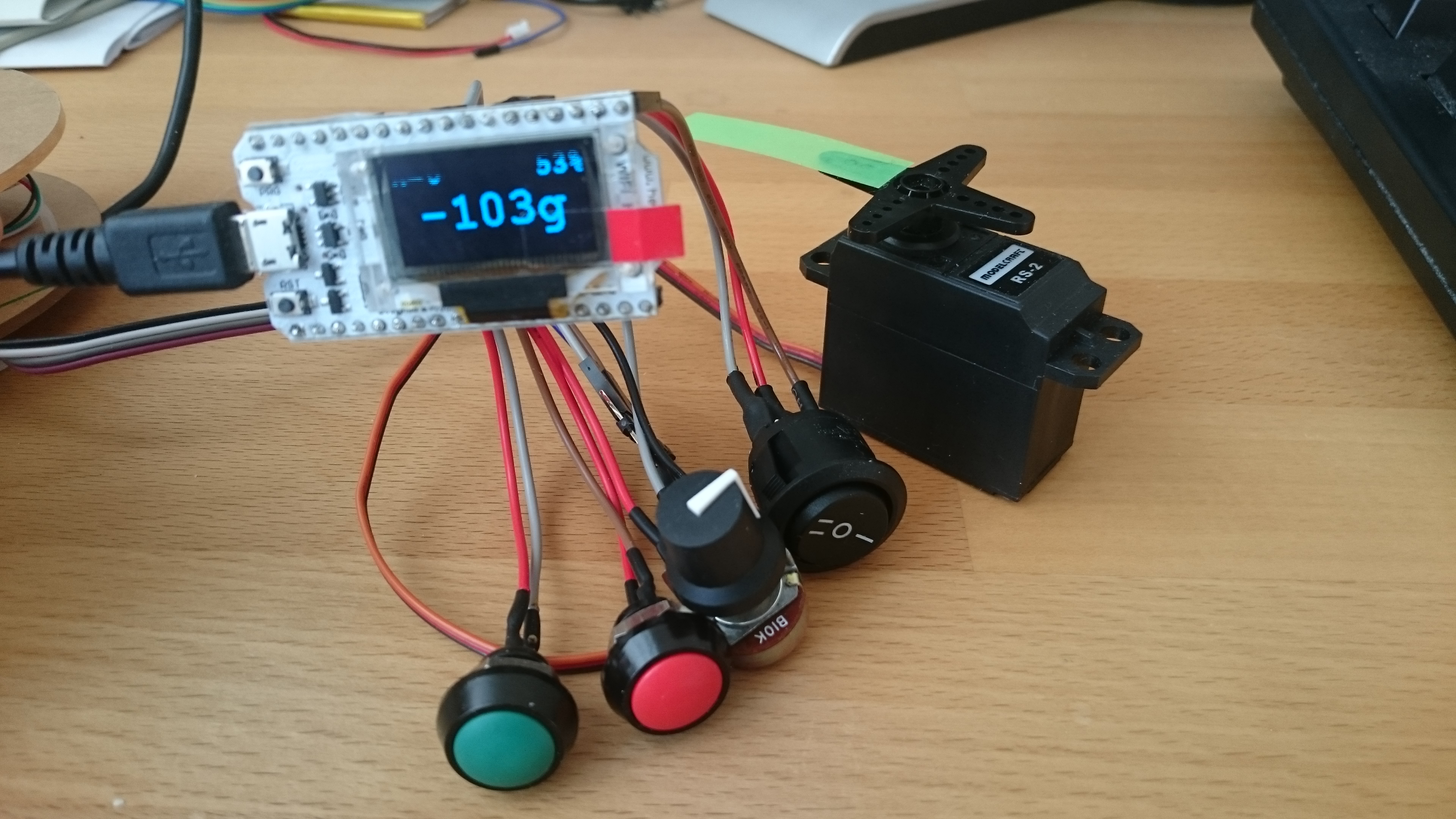
Die Waage gibt das Gewicht an einen Arduino / Microcontroller weiter - irgend einer mit 5 V (damit man mit der gleichen Spannung den Servo betreiben kann) und steuert mit Soll- und Ist-Gewicht den Servo. Wenn noch viel im Glas fehlt soll der Quetschhahn weit geöffnet sein, wenn wenig fehlt, eine kleinere Öffnung haben und kurz befür das Zielgewicht erreicht ist, schließen.
Für die Kontrolle und zum Tarieren, Einstellen des Zielgewichts brauchen wir ein Display und zwei, drei Taster.
Mechanisch soll ein kleiner Modellbau-Servo die Arbeit machen und den Quetschhahn bedienen.
Waage
- Was flaches
- Vielleicht baue ich eine kleine, sehr flache Küchenwaage von Ikea oder Saturn / …um
- Momentan habe ich noch eine Bosche H10 mit 10 kg max. hier liegen und werde diese für Tests nutzen. Produktiv ist die aber zu hoch.
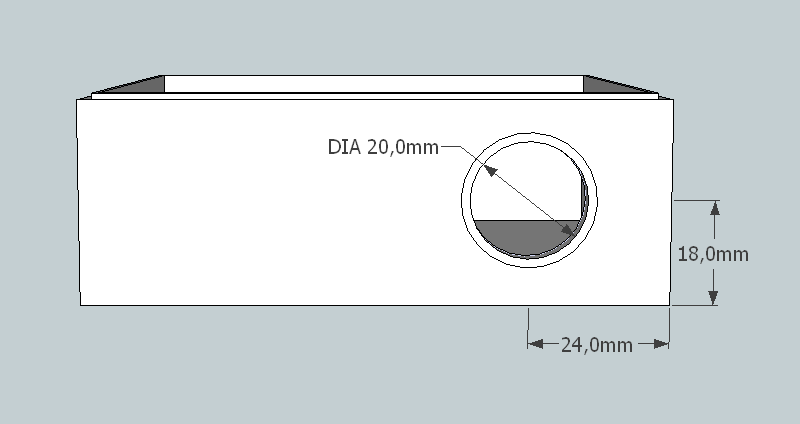
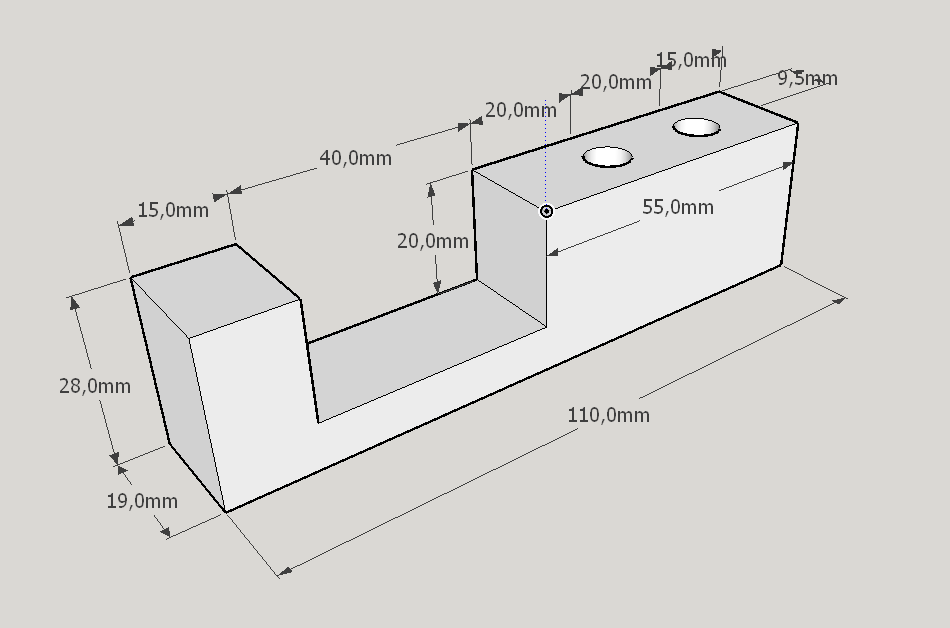
Mechanik
- Most challenging part würde ich sagen
- Habe gestern einmal mit einer Waage meinen Quetschhahn “bedient”, der ist sehr fest eingestellt, was man aber mit einem Schraubenschlüssel schnell ändern kann, Jedenfalls zeigte die Waage beim Schließen und Öffnen (noch ohne Honig) etwas unter 1 kg an, d.h. ein Servo mit 5 kg “Kraft” sollte reichen.
- Der Servo muss irgendwo befestigt werden. Eine Idee ist den Quetschhahn als Widerlager zu nutzen, dann wäre der Kübel frei bewegbar, oder die Unterläche auf dem der Behälter steht, gefällt mir aber nicht so gut.
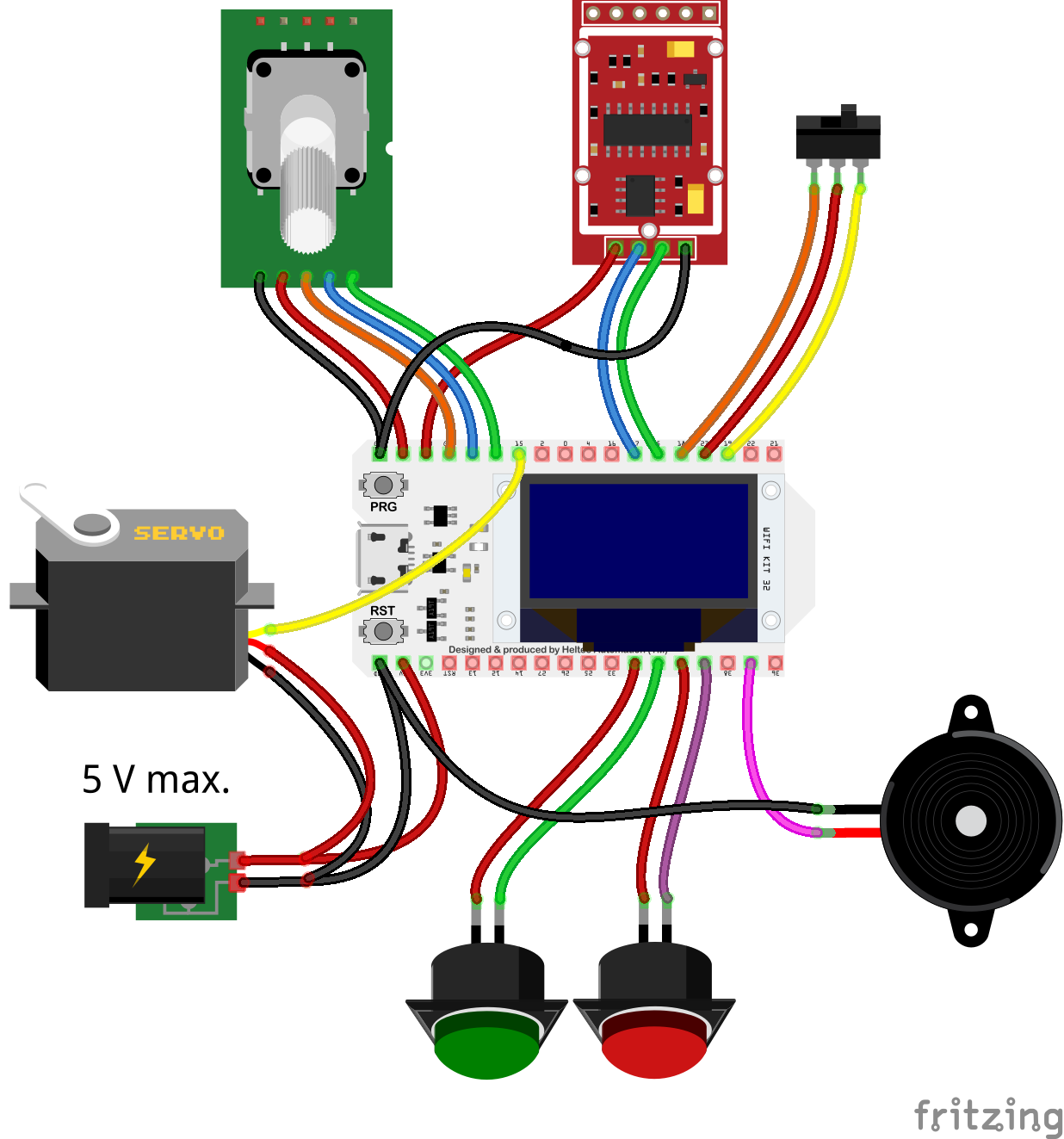
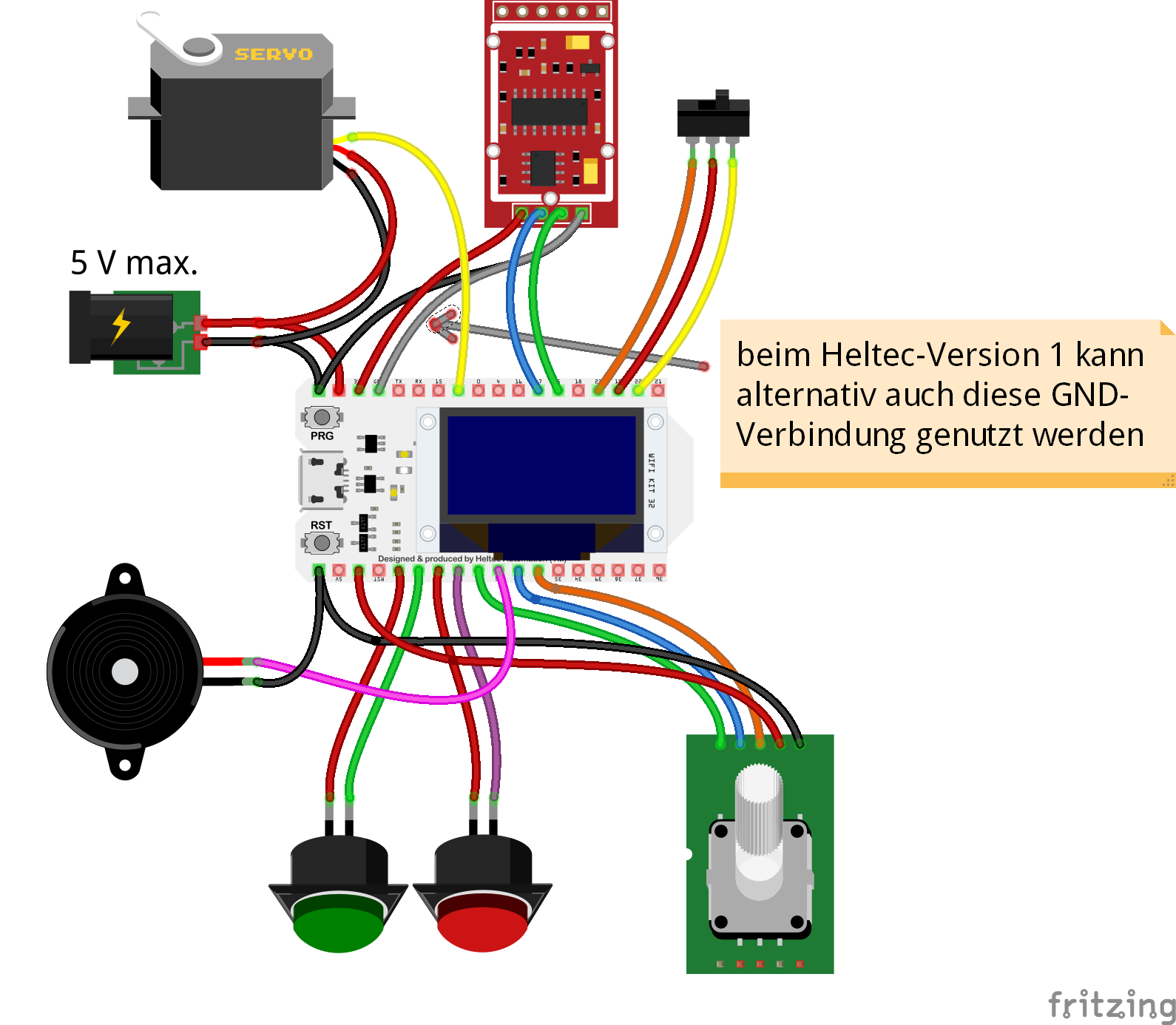
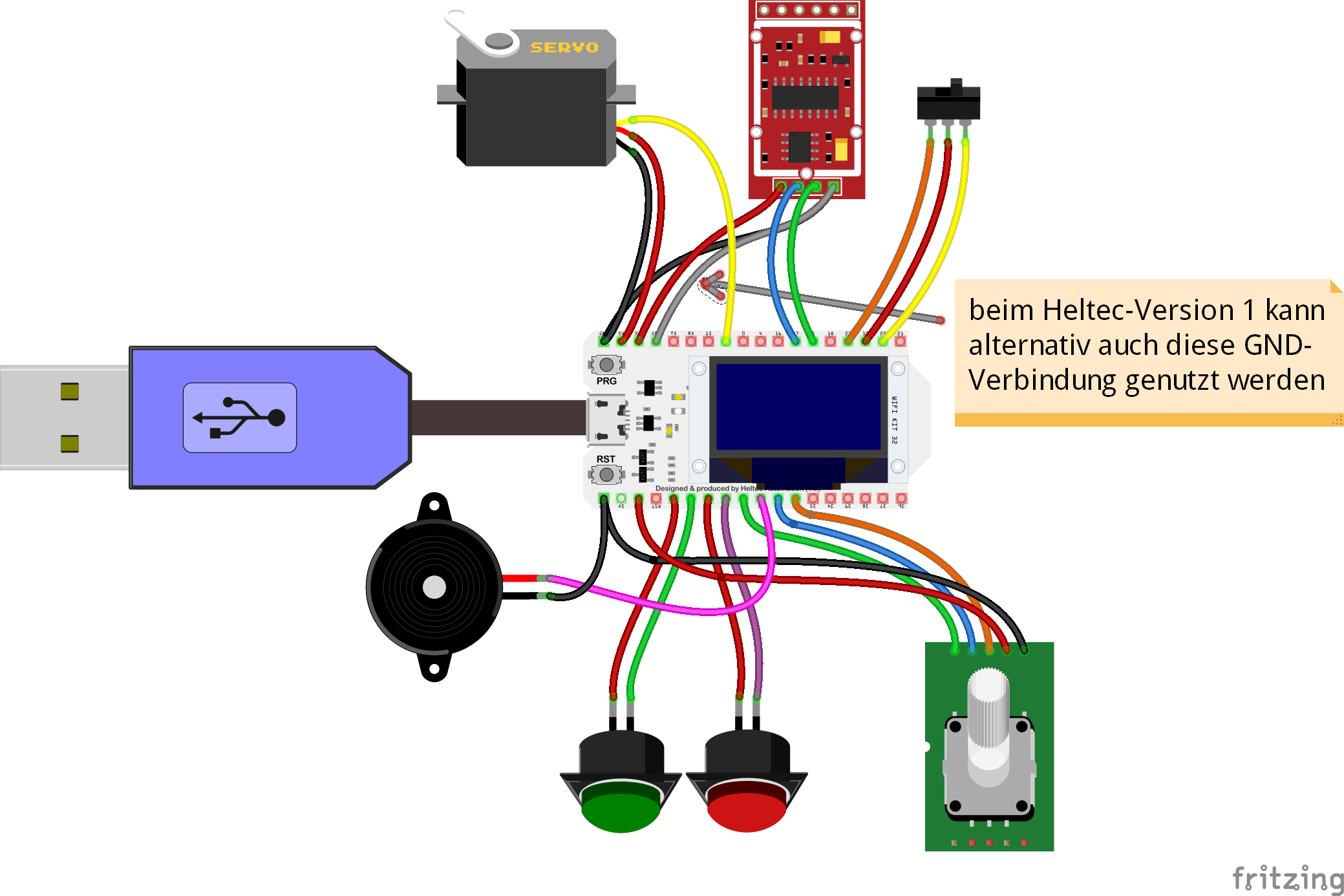
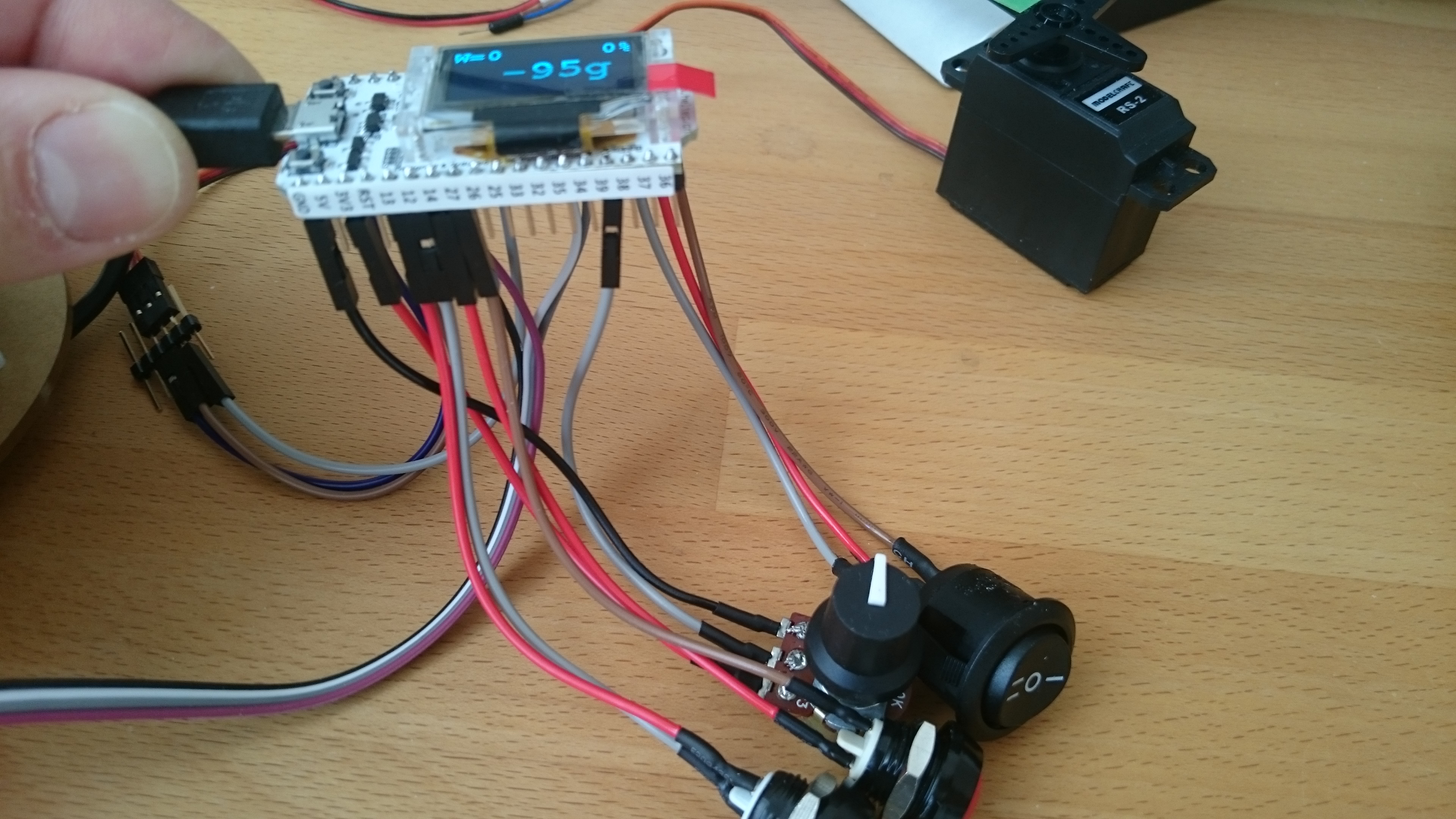
Elektronik
- 5 V Arduino, zu ersten Tests einen Uno, dann einen Pro Mini, allerdings die 5 V-Version, die ist kompakter und passt besser in ein kleines Gehäuse als der Uno
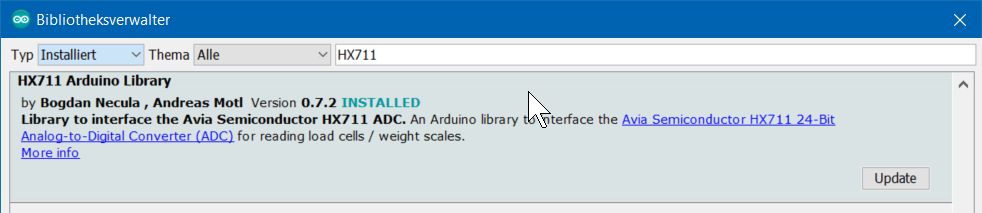
- HX711 als Wägezellen-IC
- 16x2 LCD-Display mit I2C-Anschluss oder was kleineres anderes als OLED
- 3 bis 4 Taster
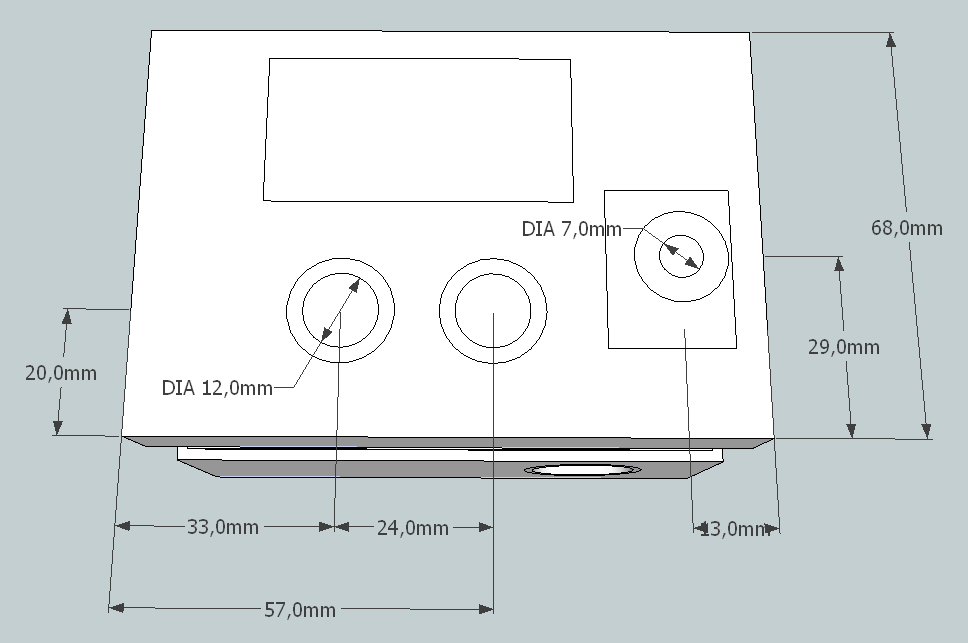
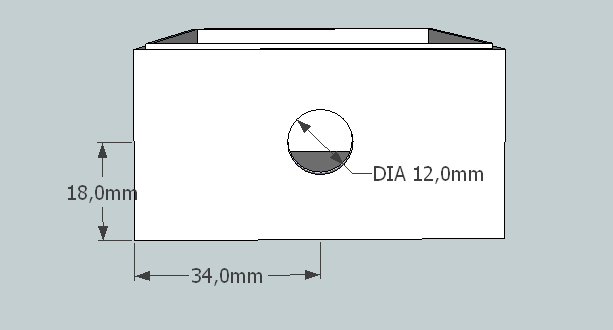
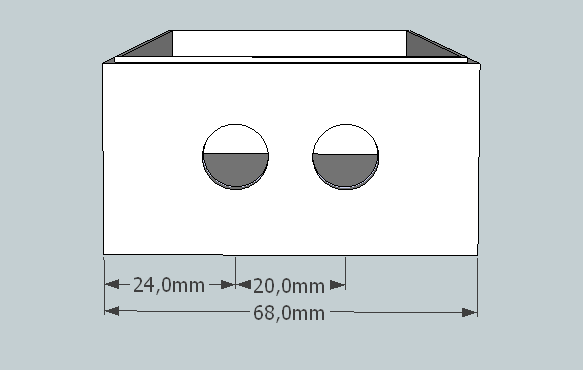
- Gehäuse mit Klarsichtdeckel, alles abwaschbar
- kein Batteriebetrieb, sondern 5 V vom Netzteil
Software
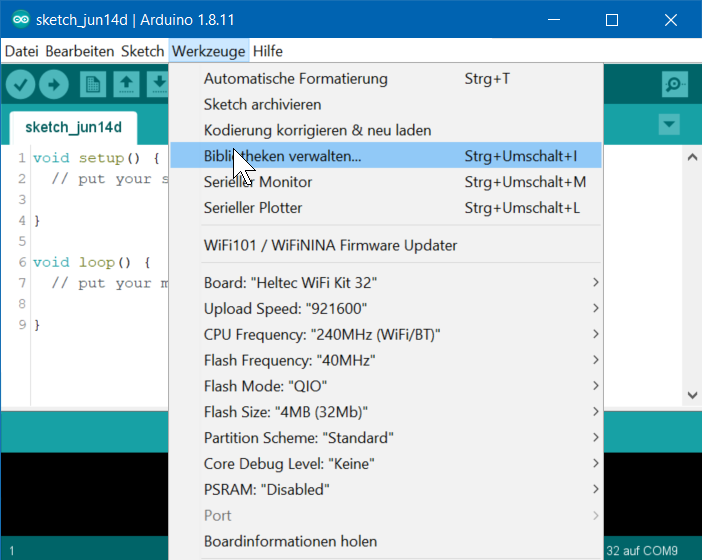
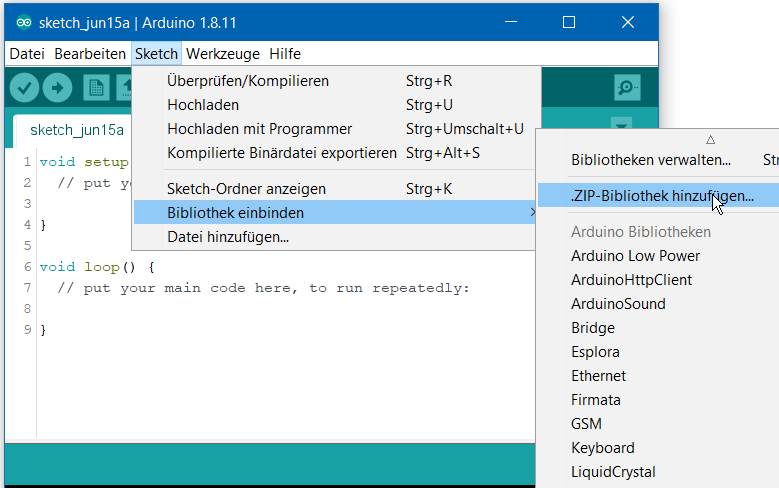
Arduino plus die üblichen Bibliotheken.
- HX711: GitHub - bogde/HX711: An Arduino library to interface the Avia Semiconductor HX711 24-Bit Analog-to-Digital Converter (ADC) for Weight Scales.
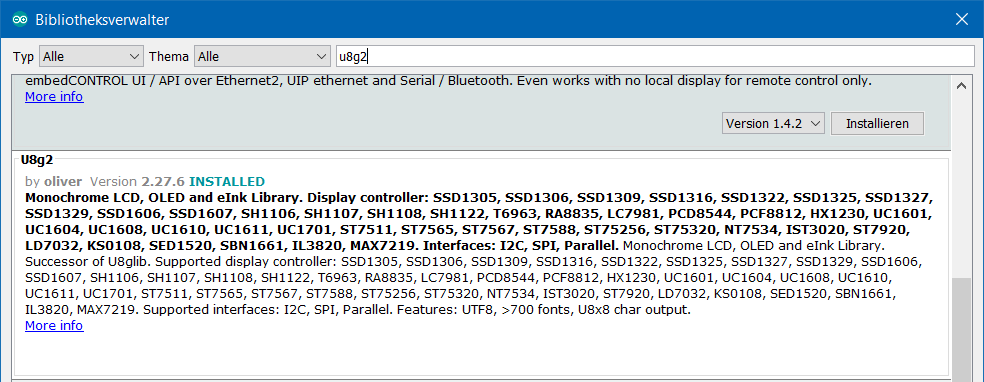
- LCD: GitHub - olikraus/u8g2: U8glib library for monochrome displays, version 2
- Servo: GitHub - madhephaestus/ESP32Servo: Arduino-compatible servo library for the ESP32