Einleitung
Im Folgenden haben ich die Schritte notiert, die ich gebraucht habe, um die vorläufige Testversion der MicroPython-Firmware bei mir auf den FiPy/WiPy zu spielen.
Denke mal es macht Sinn, diesen Beitrag als Wiki zu erstellen.
Firmware-Update
Zuerst sollte Der FiPy auf den Aktuellsten Firmwarestand gebracht werden. Dazu einfach
- den FiPy über das Expansionboard an den USB-Port anschließen,
- das Pycom Firmware Update Tool von der Pycom Seite herunterladen, installieren und starten.
- Dort sollte das Häkchen bei “Include development releases” aktiviert werden.
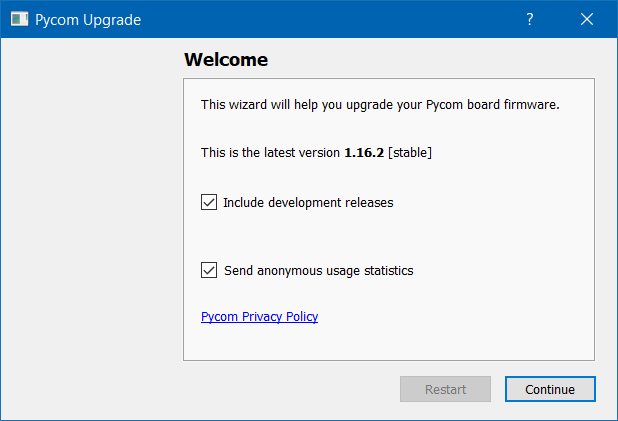
Anschließend 2mal auf continue.
Zuerst https://packages.hiveeyes.org/hiveeyes/foss/pycom/vanilla/FiPy-1.20.2.rc3-0.8.0-vanilla-squirrel.tar.gz herunterladen und irgendwo lokal abspeichern.
Nun den verwendeten COM-Port einstellen und unten “Flash from local file” auswählen und die gerade heruntergeladene Datei angeben und als File System LittleFS auswählen.

Nach dem Bestätigen sollte euer FiPy auf dem neusten Stand sein.
Entwicklungsumgebung (aka “Terkin-Sandbox”)
Jetzt ist die Entwicklungsumgebung dran. Dafür benötigen wir das Windows Subsystem for Linux (WSL).
WSL aktivieren
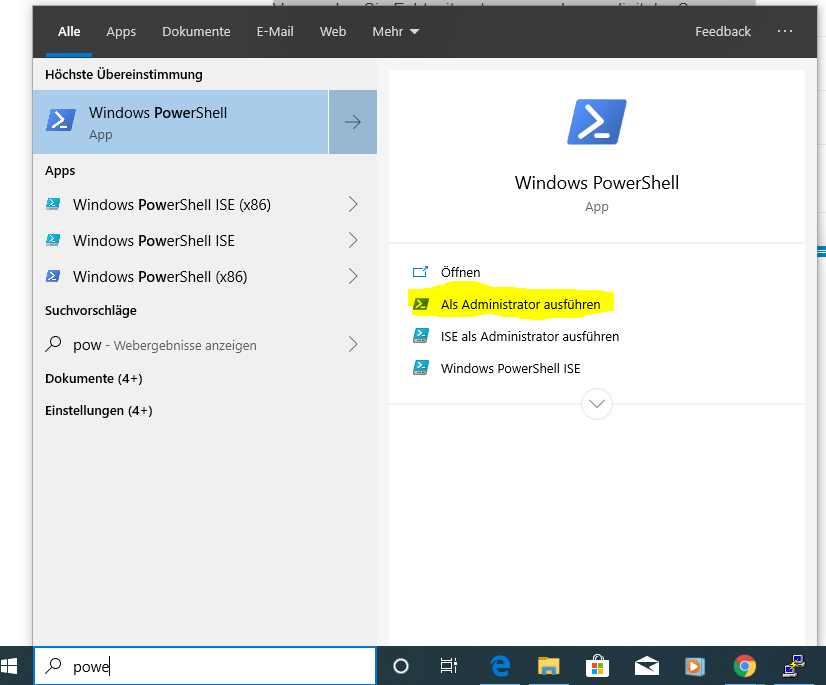
Im Suchfeld neben dem Start Button “powershell” eingeben und dann “Als Administrator ausführen” wählen.
In der Powershell jetzt eingeben und mit Enter bestätigen:
Enable-WindowsOptionalFeature -Online -FeatureName Microsoft-Windows-Subsystem-Linux
Nach Installation dieses Zusatzfeatures muß das System neu gestartet werden.
Linux-Distribution installieren
Nach dem Neustart im Microsoft Store eine Linux Distribution wie z.B. Ubuntu installieren.
Achtung: Das ist zwar kein vollwertiges Linux aber ziemlich nahe dran und reicht für unsere Zwecke völlig aus. Nach dem Starten von Linux werdet Ihr nach einem Usernamen und anschließend nach einem Passwort gefragt. Dort könnt Ihr kreativ sein.
Pakete installieren
In die Kommandozeile
sudo apt-get update
und anschließend
sudo apt install make patch wget git python python3 python-virtualenv
Terkin Datalogger-Quelltext abholen
Jetzt könnt Ihr euch den Code des Terkin Dataloggers aus dem GIT holen.
git clone https://github.com/hiveeyes/terkin-datalogger.git
danach in das neu erstellte Verzeichnis wechseln
cd terkin-datalogger/
Abhängigkeiten installieren
make setup
Mit dem Gerät verbinden
Danach die folgende Zeile anpassen und ausführen. ttyS12 steht für COM Port 12 und ttyS8 für Com8 usw…
export MCU_PORT=/dev/ttyS12
Jetzt könnt Ihr die Verbindung testen
make list-boards
und Dateien am Gerät installieren
make install
wenn es geklappt hat, dann weiter.
Einstellungen konfigurieren
Jetzt müßt ihr noch Eure Daten eingeben.
# Eigene Konfiguration aus Blaupause erstellen
cp settings.example-bob.py settings.py
# Konfiguration anpassen
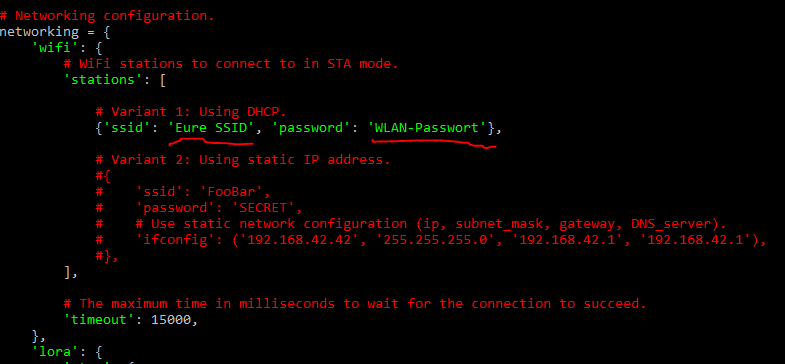
nano settings.py
Hier Eure Daten bei ssid und password eingeben.
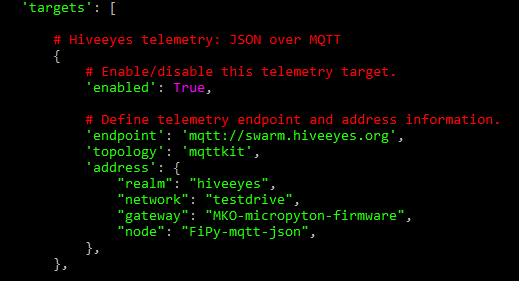
Jetzt fehlen noch die Daten für die Ubertragung per JSON over MQTT
endpoint, realm und Network übernehmen und bei gateway und node sich eine passende Bezeichnung aussuchen.
nano mit STRG+X beenden. Jetzt werdet Ihr unten gefragt ob Ihr speichern wollt dieses mit Y und Enter bestätigen.
Datenlogger interaktiv starten
Jetzt könnt Ihr Das Programm mit
make sketch-and-run
starten. Es läuft dann in einer sog. REPL-Shell und man kann die Ausführung gut beobachten. Verlassen kann man die REPL-Shell wieder per STRG+X. Abbrechen lässt sich die Ausführung per STRG+C.
Ich hoffe ich habe nichts vergessen und Ihr habt alles richtig gemacht.
