Wieder einmal eine super geile Grafik von @wtf, Danke! Frage mich gerade warum die Luftdaten-Daten (LDI = LuftDaten.Info) bei der Temperatur ganz andere Wertebereiche haben als der DWD. Ich gehe mal von mir aus und sage, da sind auch indoor-Sensoren dabei? Verfälscht das dann den Feuchte-Vergleich?
Ja, es ließe sich ja nur am Wert erahnen ob der Sensor drinnen hängt. Wie erwähnt ist der “Ausschnitt” aus dem LDI noch sehr groß: Teile Norditaliens und Kroatiens sind südlich mit drin. Eine fleißige Biene namens @Andreas plant dazu aber schon ne schöne Wabe namens “Stationsliste”.
Ein Verfälschen findet also gleichsam überall statt: Wir haben ja auch keinen Einfluss auf die Verteilung der unterschiedlichen Sensortypen oder treffen eine repräsentative Auswahl. (Noch nicht? ;)
Heyho,
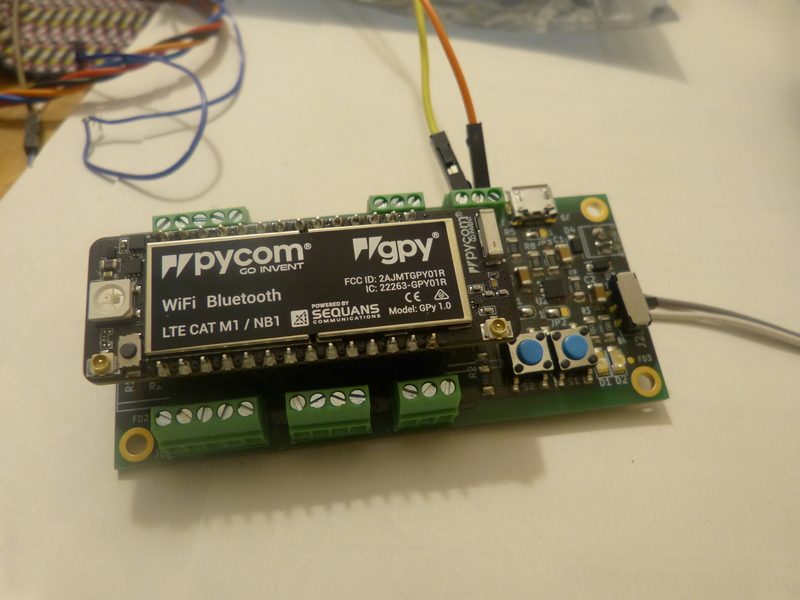
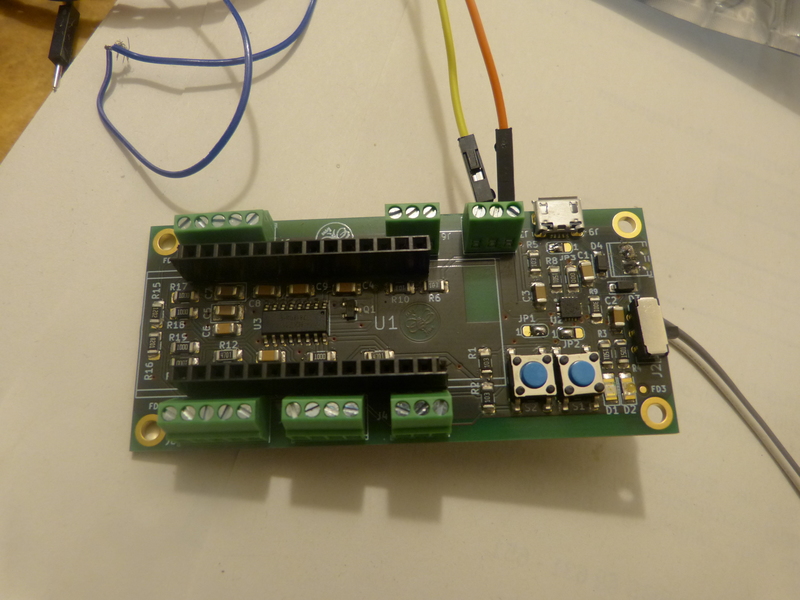
Unsere erste Version des Boards ist jetzt gebaut und getestet. Ein paar kleine Fehler haben sich im PCB noch eingeschlichen aber es läuft!
Hier ein Bild und hier der Link zum Github-repository: GitHub - jacobron/EasyHive_Pycom_Shield: a Shield for pycom-modules with Weight, Temperature, audio and I2C sensor-connections and a powerpath manager ic
5 Likes
Hallo Ron,
wir gratulieren Euch vielmals zum ersten Release der Arbeiten an diesem Datenlogger. Sehr spannend was Ihr da treibt: Zum Entwickeln von solchen Geräten mit der Leistungsfähigkeit des ESP32 und dann obendrein mit dem Komfort von Python programmierbar ist die ganze Angelegenheit eigentlich mein derzeitiger persönlicher Wunschkandidat, was Firmwareentwicklung angeht.
Pycom und Adafruit kommen uns da ja grade grundsätzlich sehr entgegen (siehe ESP-IDF and beyond: Lua with NodeMCU, Pycom's MicroPython fork and Adafruit's CircuitPython), nur selbst hatte ich zum Rantasten bisher noch nicht die Gelegenheit. Umso toller ist es nun, dass Ihr Euch nun schon stellvertretend die Finger schmutzig gemacht und die Grundlagenarbeit geleistet habt (danke!), auf der man weiter aufbauen kann.
Auf Englisch würde ich dazu im TLDR; Stil sagen:
[quote blueprint]
Nice to see some MicroPython code from the wild in the context of beehive monitoring, looking forward to send some PRs.
Viele Grüße,
Andreas.
Hi Ron, super!! Da sitzt gerade ein GPy drauf, von den pins könnte aber auch ein LoPy für LoRa oder ein günstiger WiPy für WiFi only drauf, oder? Habt ihr schon sourcen für den HX711 als chip alleine gefunden? Bisher habt ihr den ja von einem HX711 breakout runtergelötet.
Hi,
kann man über diesen USB jetzt auch Code auf den ESP32 schieben? Oder welche Möglichkeiten hätte man da?
Noch eine zweite Sache, die uns hier beschäftigt hat: wie könnten wir es hinkreigen, das Nicht-Techies, also Leute, die keine Scripte kompilieren können, das System benutzen? Wie könnte man z.B. das Einrichten des WLAN lösen? Habt ihr dazu ne Idee? Ist das bei LoRa auch ein Problem?
1 Like
Hi Caro,
vielen Dank der Nachfrage. Ja, das war uns ebenfalls von Anfang an eine Herzensangelegenheit, deshalb hatten wir uns bereits ausführlich mit dem Thema beschäftigt. An entsprechende Dinge können wir jetzt gerne wieder anknüpfen und sie aufleben lassen.
Einleitung
Lass uns vielleicht zwei Unterthemen daraus machen: a) Kompilierung und Aufbringen der Firmware und b) Einbringen von individuellen Konfigurationseinstellungen.
Also die Frage nach a), richtig?
Das geht in Richtung b), stimmts? Es gibt ja noch eine Reihe anderer Konfigurationseinstellungen wie die Datensenke für die Telemetriedaten oder die Justierungswerte für die Wägezellen, um mal die beiden populärsten Dinge zu nennen.
Wir werden im Verlauf sehen, dass man a) und b) zusammenwürfeln, aber auch getrennt lösen kann. Wann was besser passt, ist meist abhängig von der Geräteklasse, deshalb gibt es hier für die Lösung verschiedene Varianten.
a) Kompilierung der Firmware
Status quo
Inspiriert von Features der Mbed Plattform:
Applications for the Mbed platform can be developed using the Mbed online IDE, a free online code editor and compiler.
oder des NodeMCU cloud build service:
NodeMCU “application developers” just need a ready-made firmware. There’s a cloud build service with a nice UI and configuration options for them.
haben wir ein entsprechendes - deutlich generischer angelegtes - Pendant im Angebot, den “Kotori Firmware builder”. Momentan kann er Firmwares direkt aus Git Repositories kompilieren. Serverseitig haben wir dazu die SDKs für Arduino/AVR sowie Arduino/Espressif im Angebot. Hier ein Überblick über weitere Details:
Wichtige Details
Der Firmware Builder realisiert bereits wichtige Aspekte im Bereich von b), konkret handelt es sich um jeden beiden Features aus Firmware builder usage :
- Decode the firmware specifications (environment and features) from parameters of the HTTP POST request.
- Amend the source code according to these specifications.
Am ausführlichen Beispiel für die node-wifi-mqtt Firmware kann man exzellent erkennen, dass man damit über einen einfachen HTTP Request individuell konfigurierte Firmware Binaries beziehen kann. Der Mechanismus erfolgt über die Interpolation von #define Konstanten im Quelltext, bevor er an den Compiler weitergereicht wird.
Ausblick
Die Unterstützung für Pycom/MicroPython/ESP32 können wir gerne für Euch nachlegen, wenn Ihr in diesem Kontext darauf aus seid, die Firmware von @Ron und seinen Kolleginnen von EasyHive für Euch zu erschließen. Nachdem diese nun open source ist, wollten wir das ohnehin bald gerne angehen ;].
Ein webbasiertes User Interface für den Firmware Builder fehlt halt noch, aber die Maschinerie unter der Haube könnte man als “1.0-beta1” (eigentlich fertig) bezeichnen. Es sollte also machbar sein, diese Infrastruktur im Kontext von BOB zum Einsatz bringen zu können.
Falls Ihr auch in Richtung OTA (over-the-air update) schielt: Der Firmware Builder kann in diesem Bereich ebenfalls als Basis dienen: Irgendwo müssen die zur Verfügung gestellten Firmware Binaries ohnehin kompiliert werden.
Bei Fragen: fragen!
b) Individuelle Konfigurationseinstellungen
Es soll hier um Konfigurationsmöglichkeiten zur Laufzeit gehen. Das Szenario ist also: Fertiges Gerät inkl. aufgebrachter vanilla Firmware wird verschickt und der Endnutzer kann es auf einfache Art und Weise selbst konfigurieren. Die Konfigurationseinstellungen müssen dann im non-volatile Speicher des Geräts untergebracht werden, d.h. sie werden überhaupt nicht in die Firmware einkompiliert.
Gedanken zu diesem Thema wurden bereits hier im Forum ausgetauscht.
- Remote Konfiguration der Nodes (Firmware/Backend)
- Update- and configuration-strategy for Arduino-based devices
Zwei Möglichkeiten schienen für uns am plausibelsten. Wir würden - passend zum Einsatzzweck - grundsätzlich gern beide für die relevanten Firmwares erschließen.
b.1) Individueller Konfigurationsdialog via »captive portal«
Bei allen WiFi-fähigen Geräten ließe sich dieses Thema so gestalten, dass man die persönlichen Einstellungen über ein sog. captive portal vornehmen kann. Dazu eröffnet das Gerät einen WiFi access point und bietet per Mini-Webserver eine HTTP API zur Laufzeitkonfiguration an, wahlweise noch mit einem kleinen Konfigurationsdialog, so dass man die Konfiguration mit einem handelsüblichen Browser vornehmen kann.
Dafür gibt es schon zahlreiche Beispiele aus der Praxis von populären Firmware Frameworks und wir haben auch schon ein zwei Bibliotheken zusammengesammelt, wie man so etwas selbst unternehmen kann. Ich versuche einmal, sie wiederzufinden und hier als Linkliste einzufügen, wo Ihr Euch erstmal informativ umtun könnt:
- Das Homie Framework implementiert das schon sehr schön, siehe:
- Die »WiFiManager Bibliothek« stünde als entsprechende Komponente zur Verfügung, die sich ausschließlich diesem Thema widmet, siehe:
b.2) Signalisierung über HTTP/MQTT Rückkanal
Auf Basis von Wünschen wie “Es wäre ja schön, wenn man das Meßintervall auch vom Server aus steuern könnte”, würden wir diese Konfigurationsmöglichkeit ebenfalls gerne erschließen. Das Szenario ließe sich (from 10.000 ft) in etwa folgendermaßen beschreiben:
- Der Meßknoten meldet sich mit eindeutiger ID beim Server (tut er beim Übermitteln der Telemetriedaten ohnehin). Wahlweise per HTTP oder MQTT.
- Rückantwort vom Server enthält optional einen Satz von Konfigurationseinstellungen, die der Meßknoten dann einerseits anwendet und außerdem im nicht-volatilen Speicher ablegt, um sie persistent zu machen.
Viele Grüße,
Andreas.
1 Like
Danke @Andreas für die ausführliche Antwort. Wie die initiale Konfiguration auf user-Seite aussehen kann sieht man schön bei der Konfiguration des Feinstaubsensors von luftdaten.info.
siehe auch hier, als eine der Möglichkeiten (hier ESP32):
@Ron, wie habt ihr das bisher gemacht, hat das board ausgeführte FTDI-Pins oder musstet ihr den LoPy runter nehmen zum programmieren und habt das expansion board genutzt bzw. an ein FTDI-Kabel angeschlossen? USB geht glaube ich nicht, da der xPy kein USB-chip drauf hat. Ist glaube ich nur für die Stromversorgung bzw. zum Laden des LiPos.
Micropython (da geht es afaik, einfach via SSH einloggen und über die Kommandozeile) oder Arduion-IDE (mein Wissensstand, da geht es nicht)?
HEy Clemens!
Den Chip gibts auch lose aus China bei ebay, da haben wir das her
2 Likes
BIsher muss der xPy über FTDI oder Wifi eingerichtet werden.
Bei Wifi besteht laut Pycom die Gefahr, dass man sich selbst vom Gerät aussperrt.
Für den Fall müsste man noch einen BUtton für Safe Boot mit einbauen, der P12 auf high setzt, damit man seinen xPY wieder resetten kann ohne Breadboard oder sowas.
Aber wenn man eine APP für’s Smarte Phone baut, die den xPy mit der custom Firmware einrichtet (so wie das bei OSBH glaube auch ist) dann sollte nicht so viel schiefgehen.
Für Die Eichung der Waage haben wir zwei Buttons auf dem Board gesetzt, ein Tarebutton und ein Skalierwert-Button. Problem bei denen ist aber die Gefahr, dass die später ungewollt ausgelöst werden. In der Firmware sollte es also ein Setup-Modus geben, bei dem dann die Weerte eingerichtet werden können. Und vielleicht sind dann die Buttons auch am Ende unnötig wenn man sowieso mit der APP alles einrichtet.
Grüße!
Hier noch ein wenig mehr Linkfutter:
Captive Portal
-
Eine kleine Anleitung, wie man ein Captive Portal zu Fuß implementiert:
"freewifi" via ESP8266 Captive Portal -
EasySetup, der webbasierte Konfigurationsdialog des ESP Easy firmware frameworks:
OTA
1 Like
@caro, @tox wir hatten telefoniert, inwieweit es sinnvoll ist neben dem WiPy 3 oder LoPy 4 auch den GPy bzw. FiPy einzusetzen, um Standorte ohne WLAN und ohne LoRa abzudecken, die nur GPRS/LTE haben.
Der deep sleep mode scheint bei denen gut zu funktionieren, da hatte ich am Telefon ja noch Recherchebedarf angemeldet:
IMPORTANT: All the information available here is only application to the LoPy1, the WiPy 2.0 and the SiPy. The rest of the modules (W01, L01, WiPy3, LoPy4, FiPy, GPy) have proper deesleep mode that can achieve between ~5 and ~15uA.
Super, das Deepsleep hier auch geht. Ich freue mich, dass wir jetzt doch mehr Flexibilität bei der Übertragungsart haben.
Noch eine andere Frage:
Wenn jemand auf die Idee kommt, sich ein USB-Solarpanel an die Node zu klemmen, würde das dann funktionieren? Ist die Elektronik auf dem Expansion Board bzw dem easyhive-Hat so schlau, dass sie nachts Strom aus dem Akku zieht, obwohl am USB ein Ladegerät angeschlossen ist?
Ich klinke mich hier mal ein, da ich auch einen ESP32 mit Micropython am Laufen hab:
- Heltec Wifi Kit 32 mit 0,96" OLED
- Micropython 1.1 vom 27.1.2019
- DHT22 für Temperatur und Feuchte
- HX711 für Waage (ist noch mit der Post unterwegs)
Die Python-Scripte lade ich per mpfshell (USB) hoch und restarte den Chip mit
machine.reset()
WebREPL hab ich noch nicht ausprobiert.
Konfiguration:
alle 5 min wird der ESP32 aus dem deepsleep aufgeweckt und sendet die Daten per MQTT an Thingspeak und hiveeyes, danach geht er wieder in den Tiefschlaf. Ich schaue nächste Woche mal, dass ich meinen Code auf github bekomme.
Um weiter Strom zu sparen, ist geplant:
- den Chip auf 80MHz runtertakten Edit: aktuell noch nicht möglich
evtl
- nur alle 15 Minuten aufzeichnen
- Daten auf SD-Kartenshield oder internen Flash (32MB) schreiben und nur 3-4x am Tag hochladen. Wie lange hält der interne Speicher die Schreibvorgänge aus?
Zur Konfiguration des ESP32 per Web und Micropython:
schaut Euch mal bei HoneyPi um. Das WebIF sieht gut aus, vielleicht kann man sich da Code abschauen oder “ausleihen”. Einen Webserver gibt es auch für den ESP32. Per Button könnte man, wie bei HoneyPi, zwischen “normalem” Messmodus und “Konfigurationsmodus” umschalten. Im Konfigurationsmodus fungiert der ESP32 als WLAN-AP.
LG Ralf
1 Like
jep, sollte gehen genauso wie bei einem normalen solarpanel