Habe jetzt aber mal was richtig Gutes zu verkünden. Ich habe den Test mal mit dem WiPy wiederholt.
und was soll ich sagen 0.00A im Deep Sleep mit allen Sensoren und WLAN nur die MQTT und HTML Übertragung war aus genau so wie gestern mit dem FiPy.
Unter 0.00A konnte ich allerdings nicht Messen, da ich mein Messgerät in der Firma liegen lassen habe und mein Digitalnetzteil es nicht genauer ausspuckt.
Testbedingungen:
Datalogger 0.4.0
WiPy 3.0
Firmware 1.20.0.rc11
Clemens Solar Board V0.0.14 ohne Solarregler!
Bosche H40
Hx711 mit pullup
6X DS1820
1x BME280
WLAN an und verbunden
keine Datenübertragung aktiv
Eingangsspannung 4.2V
Großes Lob an dich @Andreas und alle die dir auf dem weg geholfen haben.
Wär doch gelacht, wen wir den FiPy nicht auch noch kleinlaut bekommen.
Am Ende ist die leichte Softwareanpassung vermutlich sogar wurscht, weil ja nach dem Einschlafsignal ohnehin nicht mehr mit dem HX711 kommuniziert wird und er auch ohne die Verbesserung der Software alleine durchs Vorhandensein des Pullups nun sauber einschläft.
Aktuelles master also inkl. pause
Ist aber der gleiche stand, von gestern Abend mit dem FiPy. Wenn Du möchtest kann ich das gerne mal rauskommentieren.
Ja sollte wurscht sein wichtig ist nur das das Signal min 80 microsekunden lang ist. und das ist es ja, auch wenn der WiPy in diesem falle vorher schon einnickt.
Ja habe ich.
Allerdings einen recht hohen 1MOhm.
10 K gingen nicht, da der HX711 dann nicht immer zuverläßig aufgewacht ist.
Ich vermute, das das Gate nur nach 3V3 hochgezogen wird und im False zustand offen / Hochohmig ist.
Vermutlich machen wir gerade alles richtig alles besser als bisher, aber Luft nach oben ist bekanntlich immer ;]. Remember: I’m not the hardware guy here, so don’t believe me anything about that topic and think for yourself first ;].
Was ich hierzu noch im Hinterkopf hatte: Set Level of GPIO at sleep. Es scheint eine Funktion rtc_gpio_set_level() zu geben. Kann man damit etwa mit der RTC-Einheit emulieren, was wir gerade mit dem Hinzufügen des Pullup erreicht haben oder ist das kompletter nonsense?
emulieren? wie kommst Du denn dadrauf? ;) nein. rtc_ meint in diesem Kontext die “backup domain” oder “RTC domain”, eben alles, was im deep sleep noch mit Strom versorgt wird. Einige GPIOs sind in der backup domain, daher lassen sich deren level und states ‘einfrieren’ vor und für den deep sleep.
Sollte der PD_SCK also an einem in der RTC domain befindlichen GPIO sein, könntest Du das auch in sw machen. Wenn aber extern dann auch noch ein PU ist, dann liegen die parallel, und je nach Wert des externen Widerstands wird der Gesamt-R vielleicht zu klein für den ESP32 und seine Fähigkeit, diesen pin dann auch noch nach LOW zu ziehen.
Interne pull-ups (und -downs) sind ‘weak’ und schwanken in weiten Bereichen auch im gleichen device: ab 20k bis 80k oder manchmal 100k findet man. Ein externer Widerstand dazu sollte also auch weak sein, also hier nie kleiner als 20k, besser 50k oder 100k, fast egal. Auch 1M gehen, sind aber nicht allzu störfest.
Auf diese Weise würde ein ausreichend großer externer PU nie stören, wenn eine entsprechende Funktion in der fw dennoch eingebaut wäre; die fw kann von der Annahme ausgehen, daß es egal ist, ob ein externer R an PD_SCK ist oder nicht, sobald die von Dir erwähnte Funktionalität erschlossen sein sollte.
Solange das nicht der Fall ist, oder PD_SCK an einem nicht in der backup domain befindlichen GPIO: dann hilft hier nur ein externer weak pull-up.
Herzlichen Dank für die genaue Beschreibung und die Aufklärung über RTC == “backup domain”. So in der Art meinte ich das, “emulieren” war unglücklich gewählt, weil mir der passende Jargon und v.a. das Fachwissen leider gänzlich fehlt.
Wir könnten also alternativ zum externen Pullup anstreben, jenes Feature hier zu benutzen?
Zusammenspiel zwischen internem “hold” und externem PU
Praktisch!
Fazit
Ich würde das softwareseitig so erschließen, wenn niemand Veto einlegt. Hardwareseitig: Kümmern sich diejenigen um dieses Detail, die hier mitlesen und sich zuständig fühlen? Danke!
Würde ich erst mal mit Vorsicht genießen die Aussage! Den ADS und auch den HX711 nutze ich ohne externe pull-ups! Beim ADS hatte ich den Stromverbrauch gemessen und der war ok, was ich damals - mehr aus Vorsicht als aus Wissen gemacht habe - den ADS mit einem normalen Pin mit Strom versorgt, dann kann man den kompletten Zweig abschalten. Meinen HX711 mit dem ESP8266 bzw. ESP32 und dem C-Code muss ich nochmal durchmessen!
Doof sind immer Pins, die high einen sleep mode oder “ausgeschaltet” triggern. Diese brauchen dann für unsere Verhältnisse recht viel Strom.
Also: Noch nicht ganz. Die Frage “Wie das jemals hatte funktionieren können???” ist weiterhin ungeklärt, ich habe jedoch Vermutungen. Dazu will ich kurz stichpunkthaft Bilanz ziehen. Vielleicht fällt Euch ja was dazu ein.
Einleitung
Nachdem @clemens oben schrieb, dass der HX711 nicht bzw. v.a. auch die Wägezelle in unserem aktuellen FiPy-Setup nicht stromlos wird, war ich davon ausgegangen, dass das in den frühen Open Hive Implementierungen der Fall war und entsprechend überprüft wurde.
[Nur] beim ADS hatte ich den Stromverbrauch gemessen und der war ok. […] Meinen HX711 mit dem ESP8266 bzw. ESP32 und dem C-Code muss ich nochmal durchmessen!
Bei den frühen Open Hive Implementierungen wurden niemals externe pull-ups verwendet.
Weitere gute Recherchen haben ergeben, dass diese Spezifikation so nicht im kanonischen Treiber für die Arduino-HAL implementiert ist, zumindest nicht exakt so.
Wie kann es also theoretisch funktioniert haben? (Falls überhaupt, wahrscheinlicher ist es nach dem aktuellen Stand der Erkenntnisse, dass es nicht funktioniert hat).
Wir fassen nochmals komprimierend-schlußfolgernd zusammen:
@clemens hatte keine externen pull-ups. Die verwendete MCU war ein AVR.
Die Software implementiert die Einschlafspezifikation unzureichend.
Für ordentliches Power Saving sollte PD_SCK auch im Deepsleep-Modus auf HIGH gehalten werden, was am pragmatischsten mit einem externen pull-up implementiert wird.
Wahlweise kann aber auch ein MCU-interner PU verwendet werden, wenn er in der dessen RTC-Domäne liegt und entsprechend konfiguriert wurde, den Zustand auch im Deepsleep-Modus einzufrieren (hold).
Nochmal komprimierter:
Der Softwaretreiber implementiert den Einschlafvorgang nur unzureichend.
Die Hardware fehlt augenscheinlich.
Meiner Meinung nach kann es an dieser Stelle also nur funktioniert haben, wenn - nachdem PD_SCK auf HIGH gezogen wurde - die MCU mindestens 60 us braucht um einzuschlafen und danach irgendein pull-up (sei es extern oder intern) übernimmt, der PD_SCK dauerhaft auf HIGH hält.
Das kann nicht anders sein, weil der Aufwachvorgang definitiv durch PD_SCK auf LOW determiniert ist:
When PD_SCK returns to low, chip will reset and enter normal operation mode.
An dieser Stelle ist auch die Implementierung korrekt:
Nun meine eigentliche Frage zur vermuteten Folgerung:
Kann es sein, dass auf dem Breakout-Board (oder nur auf bestimmten?) ein entsprechender pull-up verbaut ist? Das würde nach dem aktuellen Stand der Recherchen für mich absolut Sinn machen und wäre gleichzeitig die letzte Hoffnung für eine entsprechende Erklärung, wie es überhaupt funktioniert haben könnte.
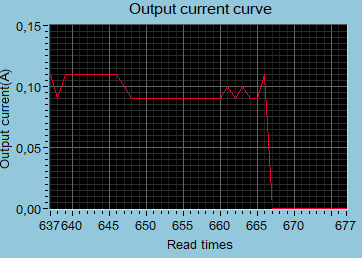
So Konnte jetzt mal den WiPy im Deep Sleep mit allen Sensoren Messen. Im Deep Sleep braucht er mit dem pullup im Deep Sleep 320μA ohne pullup 8,7mA.
ob die 80ns in der Software sind oder nicht ist egal.
Die 320μA Teilen sich wie gefolgt auf:
171μA für die 6 DS1820
98 μA HX711
29 μA BME280
22 μA WiPY 3.0
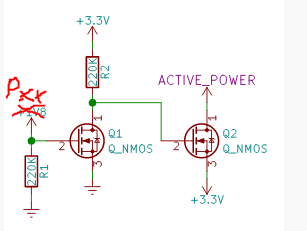
Mehr können wir denke ich nur noch Sparen, wenn wir den ganzen 3,3V Zweig mit einer FET Schaltung wie die hier von @Andreas angefragt und von @clemens schon angedeutet .
mit einem beliebigen Pin Ein und ausschalten.
Pxx False = 3V3 Aus
Pxx True = 3V3 An
Muß mal schauen ob ich noch ein paar kleine MOSFET in der Grabbelkiste finde.
Vielleicht baue ich die Schaltung mal auf.
Ich denke aber, da wir den Deep Sleep beim FiPy nicht mal ansatzweise Erreichen, sollten wir uns besser erstmal darauf konzentrieren.
Irgendwas Läuft da intern auf alle fälle voll Durch, was beim WiPy nicht vorhanden ist.
Was ich hier noch als Thema fürs Strom sparen vermisse ist die Zeit in dem der Node wach ist.
Lässt diese sich evtl verkürzen? wenn wir jezt beim WiPy schauen ist der Unterschied Wach und Schlafmodus in einem so großen Verhältnis, das es evtl nur ein paar Sekunden mehr Gesammt-Laufzeit bringt im Schlafmodus Strom einzusparen. aber es bringt bestimmt Einige Stunden - Tage oder sogar Wochen , wenn man den Wachzustand verkürzt.
Gibt es da eine Möglichkeit?
Kann man einige Sachen parallel oder im Hintergrund laufen lassen? z.B. WLAN Starten und die Sensoren hochfahren und danach erst testen ob die Verbindung geklappt hat. Die Einstellungen der DS1820 zwischenspeichern um nicht jedes mal nachfragen zu müssen Wer und wo bist Du.
Oder Sensoren die recht lange zum starten brauchen, sich aber nur recht langsam die Werte ändern oder nicht so interessant sind nur jedes 2. bis 3. mal auszulesen und zu übertragen.
Ja, das sehe ich auch so. Vermutlich ist es das LTE-Modem. Eine verlässliche Quelle berichtete mir:
Strom sparen durch Laufzeitoptimierung
Absolut. Selbst wenn es im Vergleich dann nicht mehr so signifikant viel am Stromverbrauch einsparen wird, würde ich das alleine aus Laufzeitoptimierungsgründen exakt so tun.
Erstmal müssen wir aber die deutlich teurere Peripherie abschalten – Pflicht vs. Kür ¹.
Grundsätzlich würde ich aber sehr sehr gerne die Verarbeitung von Teilen der verschiedenen Subsysteme im Hintergrund erledigen. Durch das wunderbare FreeRTOS unter der Haube und die Ausführung per Threads innerhalb von Python ist das grundsätzlich voll erschlossen, will dann aber natürlich auch ordentlich koordiniert werden, damit das Gesamtsystem weiterhin robust bleibt.
Ich hoffe das passt für Dich.
Viele Grüße,
Andreas.
¹ An den Spruch “premature optimization is the root of all evil” muss ich mich manchmal auch diszipliniert selbst halten - mag er auch manchmal nicht angebracht sein (Ausnahmen bestätigen die Regel). Selbstverständlich immer mit Augenzwinkern ;].


{kind=link}