Von Andreas H. / @aholzhammer gibt es unter Galerie – Hanimandl einen Prototypen, der ein großes Touch-TFT als Interface für den HaniMandl verwendet.

Da war ich mir nicht so sicher wie zuverlässig touch-Elemente sind, wenn es um kritische Dinge wie z.B. schnelles Abbrechen geht. Weiter müsste das Touch-TFT offen sein.
Andreas H. / @aholzhammer schätzt die TFTs prinzipiell als gut funktionierend ein. Aber da TFTs kaum abzudichten sind und die ggf. mit klebrigen Fingern auch nix taugen wurde das nicht weiter verfolgt.
Nun hat @PeterB in der Facebook-Gruppe Fotos gepostet in denen er die mechanischen Taster des HaniMandls mit diesen
kapazitiven Touch-Sensoren ersetzt hat. Das schaut dann so aus!


Das eingesetzte breakout verwendet einen TTP223. Zum breakout gibt unter ein https://www.instructables.com/Tutorial-for-TTP223-Touch-Sensor-Module-Capacitive/ So weit ich das sehe ist der TTP223 nur für einen Kanal / “Taster” ausgelegt, es gibt aber auch den MPR121 mit 12 Kanälen, der aber anders (per I2C) angesprochen werden muss.
Für ein komplett abwaschbares könnte man den rotary theoretisch auch mit zwei Touch-Elementen realisieren. Ich denke aber der ist physikalisch schon noch deutlich intuitiver zu bedienen als zwei Taster oder touch-Sensoren.
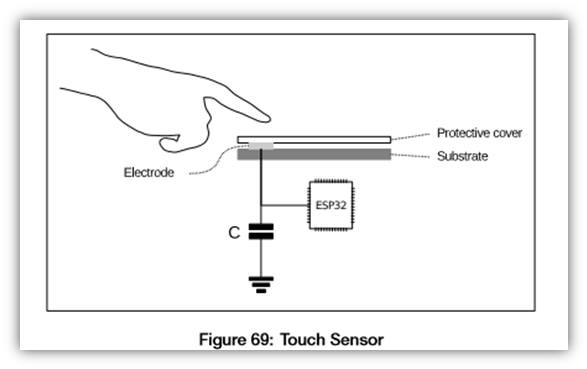
Meine Frage, die sich anschließt: Bräuchten wir den TTP223 o.ä. überhaupt? Der ESP hat ja auch “touch pins”. Bisher habe ich nur Videos gesehen bei denen dafür die blanke Verdrahtung angefasst werden musste. Könnte man damit auch berührungslose “Taster” realisieren, d.h. ähnlich wie hier bei den FB-Totos mit Plastik / Gehäuse dazwischen?
Hier https://www.instructables.com/ESP32-With-Capacitive-Touch-Button/ wird in der Demo zwar immer eiin Kabel gezeigt, das man direkt anfasst, in der Abbildung weiter unten gibte es aber auch eine “Protective Cover” über der Elektrode! Könnte also mir ESP32 only ohne die breakouts auch funktionieren!
Für mich hängt der Einsatz von touch-Interfaces tatsächlich an der Zuverlässigkeit der Sensoren. Fürs Einstellen sehe ich das noch unkritisch, aber sobald man mal doch abbrechen muss können nicht funktionierende Taster schon Sauerei anrichten. ;-)

