Description
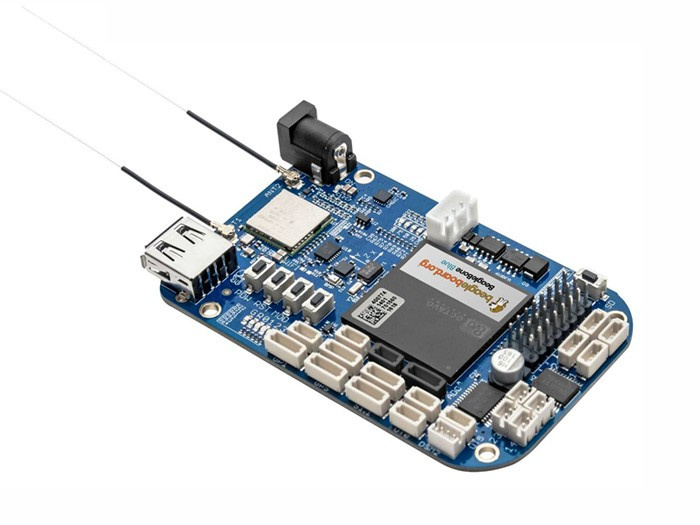
BeagleBone™ Blue is based on the extremely successful open-source hardware design of BeagleBone™ Black, a high-expansion, maker-focused, community-supported open hardware computer, created by the BeagleBoard.Org Foundation.
BeagleBone™ Blue combines the high-performance flexible WiFi/Bluetooth WiLink™ interface of the BeagleBone™ Black Wireless and the robotics capabilities of the Robotics Cape from Strawson Design. BeagleBone™ Blue has onboard 2 cell (2S) LiPo battery management with charger and battery level LEDs, 8 servo motor outputs, 4 DC motor drivers, 4 quadrature encoder inputs, a wide array of GPIO and serial protocol connectors including CAN, a 9 axis IMU and barometer, 4 ADC inputs, a PC USB interface, an USB 2.0 host port, a reset button, a power button, two user configurable buttons and six indicating LEDs. Built on Octavo Systems’ System-In-Package that integrates a high-performance TI ARM processor and 512MB of DDR3, BeagleBone™ Blue boots Linux in around 10 seconds and gets you started developing through your web browser in less than 5 minutes with just a single USB cable.
Features
-
**Processor: Octavo Systems OSD3358 1GHz ARM® Cortex-A8 **
- 512MB DDR3 RAM
- Integrated power management
- 2×32-bit 200-MHz programmable real-time units (PRUs)
- ARM Cortex-M3
- On-board 4GB 8-bit eMMC flash storage programmed with Debian Linux
-
Connectivity and sensors
- Battery: 2-cell LiPo support with balancing, 9-18V charger input
- Wireless: 802.11bgn, Bluetooth 4.1 and BLE
- Motor control: 8 6V servo out, 4 DC motor out, 4 quadrature encoder in
- Sensors: 9 axis IMU, barometer
- Connectivity: HighSpeed USB 2.0 client and host
- User interface: 11 user programmable LEDs, 2 user programmable buttons
- Easy connect interfaces for adding additional sensors such as:
- GPS, DSM2 radio, UARTs, SPI, I2C, 1.8V analog, 3.3V GPIOs
-
Software Compatibility